 |
Dernière révision : septembre 2023 |  |

 |

|

|

|

|

|

|

|
Architecture d'un ordinateur
Philippe Notez (philippe.notez@musee-info.fr)

Sommaire
Introduction L’électronique et l’informatique ont profondément modifié notre société. C’est certainement la révolution industrielle la plus rapide de l’histoire de l’humanité. En effet, l’ordinateur que nous connaissons aujourd’hui était tout simplement inimaginable il y a seulement une cinquantaine d’années. Et avec les Arduino, les ESP8266 ou les Raspberry Pi Pico, l'aventure est loin d'être terminée. L’auteur ne pourra en aucun cas être tenu responsable des dommages qui résulteraient de l’utilisation des informations publiées sur ce site, sous licence Creative Commons BY-NC-SA. Toute reproduction ou modification d'un document, même partielle, est autorisée à condition que son origine et le nom de l'auteur soient clairement indiqués (BY), qu'il soit utilisé à des fins non commerciales (NC), que son mode de diffusion soit identique au document initial (SA), et que cela ne porte pas atteinte à l’auteur. Ce document présente les composants essentiels d'un ordinateur, en espérant toujours être le plus clair et précis possible. Malgré tout le soin apporté à la rédaction, l'auteur vous remercie de bien vouloir le contacter si vous relevez la moindre erreur ou omission, et vous souhaite une agréable lecture. Si vous avez apprécié ce document, vous pouvez faire un don ici. Merci pour votre soutien. Les deux piliers Nous avons vu comment :
En effet, les deux composants les plus importants d'un ordinateur sont :
Modèle de von Neumann L’informatique est la science du traitement de l’information, de manière automatique. Un ordinateur est une machine qui gère ce traitement. Pour traiter une information, il faut :
Les quatre générations On distingue généralement quatre générations d’ordinateurs, en fonction de l’évolution du matériel, utilisant pour les traitements :
D’autres classements existent, tout aussi importants, en fonction par exemple de l’évolution des langages de programmation :  Composants et périphériques Dans un ordinateur, on distingue les composants et les périphériques. Parmi les composants, on trouve la carte mère, le microprocesseur, la mémoire, la carte graphique, etc... Les composants sont liés physiquement (sans câble) à la carte mère, ou connectés via des bus d’extension, et sont choisis en fonction des caractéristiques de cette dernière (par exemple, une carte mère n’accepte que certains microprocesseurs en fonction du socket utilisé). Les périphériques sont indépendants et peuvent donc (en théorie) être branchés sur tous les ordinateurs, grâce à des câbles. Carte mère La carte mère est la carte principale de l’ordinateur. Elle supporte le microprocesseur, la mémoire, ainsi que les différents bus d’extension, permettant par exemple la connexion d’une carte graphique. Elle gère la communication entre le microprocesseur et les autres composants / périphériques grâce à un chipset. 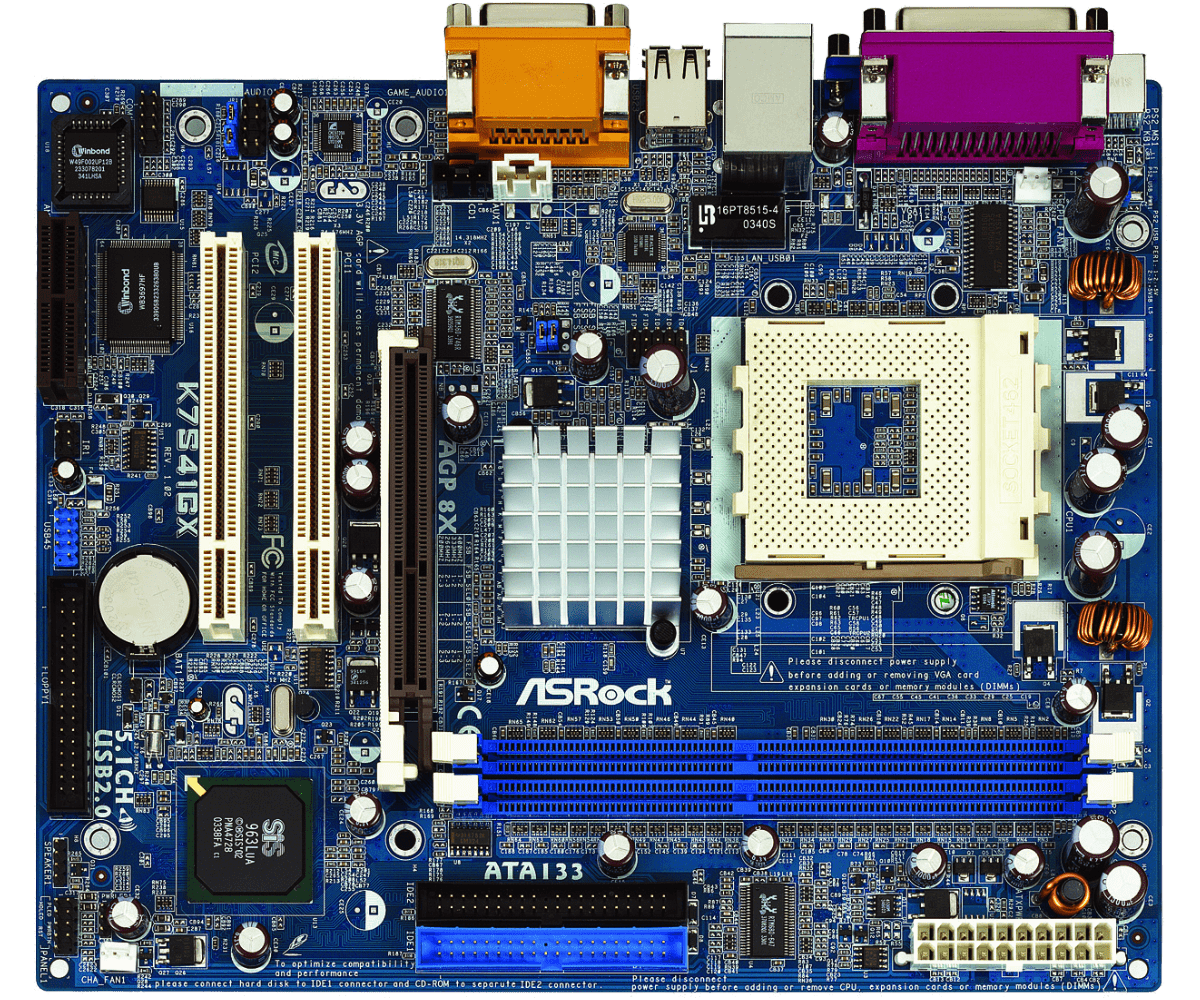 à gauche du socket le chipset (ou plutôt son radiateur), et à gauche du chipset les connecteurs d'extension. Microprocesseur : introduction Le microprocesseur, appelé également CPU (Central Processing Unit) est le cerveau de l’ordinateur. Il contient l'UAL (Unité Arithmétique et Logique) ou ALU (Arithmetic and Logic Unit) en logique combinatoire. Depuis le premier microprocesseur, l'Intel 4004 (1971), les performances ont fortement évolué, grâce notamment à :
Un microprocesseur utilise une horloge avec une fréquence définie (un nombre de cycles identiques par seconde, où l'horloge passe de l'état bas à l'état haut, et inversement). Avec une horloge dont la fréquence est de 1 MHz (106 cycles par seconde), la durée d’un cycle est de 1 µs (1 / 106 ou 1 x 10-6 ou 0,000001 seconde) :  Les instructions les plus simples nécessitent quelques cycles d’horloge pour s’exécuter (parfois même un seul cycle), alors que les plus complexes peuvent exiger plusieurs dizaines de cycles. La fréquence d’horloge est donc primordiale : plus la fréquence est élevée, plus le microprocesseur effectue les traitements rapidement. Mais l’augmentation de la fréquence pose un problème : plus le microprocesseur va vite, plus il chauffe ! On corrige ce problème en diminuant, par exemple, la tension d’alimentation. Néanmoins, nous atteignons aujourd’hui des limites physiques difficilement franchissables. On s'oriente donc depuis plusieurs années vers des microprocesseurs multi-cœurs, permettant d'augmenter encore les capacités de traitement. Des recherches sont également en cours pour utiliser dans le futur des ordinateurs d’un autre type, comme par exemple l’ordinateur quantique. A suivre... Microprocesseur : mémoire cache La mémoire principale est constituée de mémoire vive dynamique nécessitant un rafraîchissement périodique pour conserver ses données. Ce rafraîchissement prend du temps, et pendant ce temps, la mémoire principale n'est pas disponible. Pour éviter au microprocesseur d'attendre la disponibilité de la mémoire principale, on va ajouter de la mémoire vive statique (Static Random Access Memory), que l'on appelle mémoire cache, entre le microprocesseur et la mémoire principale. La mémoire vive statique ne nécessite pas de rafraîchissement, elle est donc accessible plus rapidement que la mémoire principale, mais nécessite plus d'espace car elle utilise plus de transistors. Le microprocesseur va vérifier si la donnée dont il a besoin se trouve en mémoire cache. Si ce n'est pas le cas, il va la récupérer en mémoire principale. Une fois le traitement effectué, il va l'enregistrer en mémoire cache. Ainsi, la prochaine fois qu'il en aura besoin, il va gagner du temps puisqu'elle se trouvera en mémoire cache. Il faut mettre en mémoire cache les données susceptibles d'être le plus souvent utilisées car elle est beaucoup plus petite que la mémoire principale. Il faut également utiliser des algorithmes de synchronisation permettant d'avoir les mêmes valeurs en mémoire cache et en mémoire principale, sinon on risque d'avoir des erreurs car seul le microprocesseur a accès à la mémoire cache. Les microprocesseurs actuels intègrent plusieurs niveaux de mémoire cache. La mémoire cache (ou simplement cache) de niveau 1 est rapide, mais de taille limitée (quelques dizaines de kio*). Le cache de niveau 2 est moins rapide, mais de taille plus importante (quelques centaines de kio). On peut également trouver dans certains microprocesseurs un cache de niveau 3 (quelques Mio). Le microprocesseur va d'abord chercher la donnée dans le cache L1 (Level 1), puis, s'il ne la trouve pas, dans le cache L2, et ainsi de suite... Quelques temps d'accès : 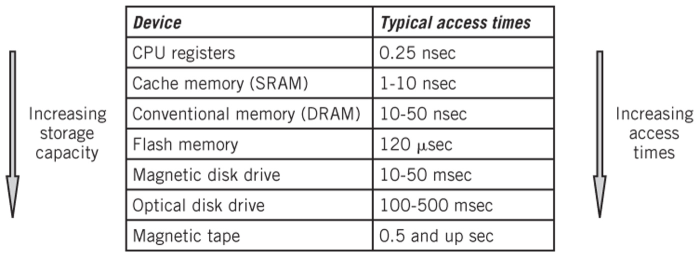 Pour effectuer un traitement (calcul, comparaison, etc...), les instructions du microprocesseur ont accès uniquement aux registres. Ce sont les mémoires les plus rapides, mais au nombre très limité (quelques dizaines d'octets au plus). Microprocesseur : pipeline et architecture superscalaire Pour exécuter une instruction, le microprocesseur passe par plusieurs étapes. Considérons, par exemple, quatre étapes :
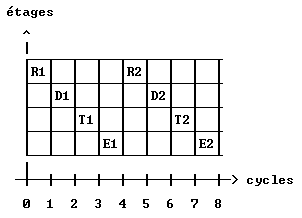 Au bout de huit cycles, nous avons exécuté deux instructions car l'instruction suivante ne peut commencer qu'une fois toutes les étapes de l'instruction précédente effectuées. Nous constatons beaucoup d'étapes inutilisées au niveau de chaque cycle. Et si on remplissait les cases vides ! Cela nous donne : 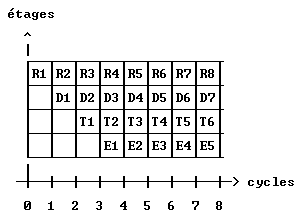 Nous exécutons toujours une instruction en quatre cycles d'horloge, mais au bout de huit cycles, nous avons exécuté cinq instructions au lieu de deux ! Bien-sûr, pour cela, le processeur doit pouvoir exécuter les quatre étapes simultanément. Au plus nous avons d'étapes (on parle de profondeur, la profondeur étant le nombre d'étapes), au plus le temps global d'exécution diminue... Enfin, jusqu'à une certaine limite. En effet, même si nous avons vu que le pipeline augmente les performances du microprocesseur, il pose problème dans certains cas : si, par exemple, l'instruction 5 a besoin du résultat de l'instruction 4, elle doit être arrêtée et attendre la fin de l'exécution de l'instruction 4. Pour éviter les erreurs, il faut utiliser des algorithmes qui gèrent Ces dépendances, et on perds du temps... Une architecture superscalaire utilise plusieurs pipelines, plusieurs instructions peuvent donc être exécutées simultanément (traitement parallèle), mais avec là aussi des limitations liées aux dépendances. Microprocesseur : architectures CISC et RISC L'architecture CISC (Complex Instruction Set Computer) utilise des instructions qui peuvent nécessiter plusieurs dizaines de cycles d'horloge et qui ne s'exécutent pas pendant le même nombre de cycles. Au contraire, l'architecture RISC (Reduced instruction set computer) utilise des instructions qui ne nécessitent que quelques cycles d'horloge (voir même un seul cycle) et qui s'exécutent toutes pendant le même nombre de cycles. Dans un pipeline, toutes les instructions doivent s'exécuter pendant un même nombre de cycles. On ne peut donc pas utiliser de pipeline dans un microprocesseur CISC. Mais alors, dans ce cas, pourquoi avoir créé des microprocesseurs CISC ? Car toute la complexité était gérée au niveau du microprocesseur. Pour le programmeur, le codage était beaucoup plus facile. Oui mais on perdait la rapidité (grâce aux pipelines) des microprocesseurs RISC... Les deux architectures se sont ainsi opposées pendant des décennies, chacune vantant ses avantages par rapport à l'autre, dans les magazines de l'époque. Aujourd'hui, la paix est de retour (définitivement) car les microprocesseurs sont CISC... Et RISC en même temps ! Le ou les cœur(s) utilise(nt) une architecture RISC superscalaire (plus simple à mettre en œuvre qu'une architecture CISC, on peut donc augmenter le nombre de cœurs sans perdre trop de place), mais c'est une architecture CISC qui gère la partie «décodage des instructions» : les instructions CISC sont décomposées en instructions RISC, et sont ensuite envoyées au(x) cœur(s). Ainsi, le processseur est vu de l'extérieur comme un processseur CISC, le code reste simple et agréable à lire. Enfin, tout dépend du programmeur... Bus de données, d'adresses et de contrôle 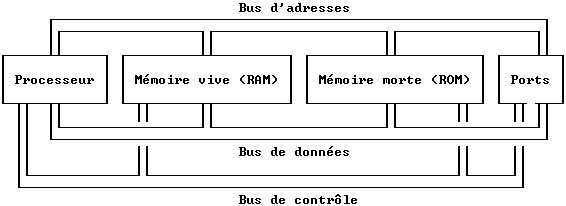 Pour communiquer avec les autres composants, un microprocesseur utilise trois bus : un bus de données, un bus d’adresses, et un bus de contrôle. Le bus de données permet la lecture ou l'écriture d'une valeur, c'est donc un bus bidirectionnel. Par contre, seul le microprocesseur définit l'adresse à lire ou à écrire, le bus d'adresses est donc un bus unidirectionnel. Le bus de contrôle est un bus bidirectionnel permettant la synchronisation des composants et la gestion des E/S, grâce au mécanisme des interruptions. La largeur du bus de données détermine les nombres que le microprocesseur peut traiter. Avec un bus de données sur 4 bits, le microprocesseur peut traiter des nombres allant de 0 à 15 (24-1) en binaire non signé, ou de -8 à 7 (-23 à 23-1) en binaire signé. En 1971, avec le premier microprocesseur, l'Intel 4004, on était donc un peu limité... Avec un bus de données sur 8 bits, le microprocesseur peut traiter des nombres allant de 0 à 255 (binaire non signé) ou de -128 à 127 (binaire signé), c'est un peu mieux. Avec un bus de données sur 16 bits, le microprocesseur peut traiter des nombres allant de 0 à 65535 (binaire non signé) ou de -32768 à 32767 (binaire signé), c'est beaucoup mieux. Avec un bus de données sur 32 bits, on dépasse 4 milliards en binaire non signé et 2 milliards en binaire signé, c'est suffisant dans la plupart des cas. La largeur du bus d'adresses détermine la quantité de mémoire à laquelle le microprocesseur peut accéder. Avec un bus d'adresses sur 16 bits, le microprocesseur peut accéder à 65536 adresses (64 kio), c'est un peu juste. Avec un bus d'adresses sur 32 bits, le microprocesseur peut accéder à plus de 4 milliards d'adresses (4 Gio), c'est suffisant dans la plupart des cas, Les les microprocesseurs actuels utilisent des bus de données et d'adresses sur 64 bits. Chipset Le pont nord, northbridge ou GMCH (Graphics and Memory Controller Hub), gère le FSB (Front Side Bus ou bus système) reliant le microprocesseur, la mémoire et la carte graphique. Il nécessite donc une bande passante importante (bus rapide et large). Le pont sud, southbridge ou ICH (Input/output Controller Hub), gère la communication avec les périphériques (clavier, souris, disque dur, carte réseau, ports USB, etc...). Il nécessite une bande passante plus faible. Le composant appelé chipset est l’ensemble de ces deux ponts, à l'intérieur d'un même circuit intégré. Documentation complémentaire
* 1 ki (kilo informatique) = 1024 et non pas 1000, donc 1 kio = 1024 octets et 16 kio = 16384 octets. |
| Haut de page |
|

|

|